I completed my Postdoc. at Caltech in the Computing and Mathematical Sciences department. I am working with Prof. Soon-Jo Chung and Prof. Fred Hadaegh in the Autonomous Robotics and Control Lab. at Caltech. I am also affliated with the Center for Autonomous Systems and Technologies (CAST)
I earned my PhD from the University of Texas at Austin in Aerospace Engineering in 2025 advised by Prof. Efstathios Bakolas and Prof. Takashi Tanaka. I am broadly interested in the intersection of motion planning, optimization, control theory, data-driven control, and robotics.
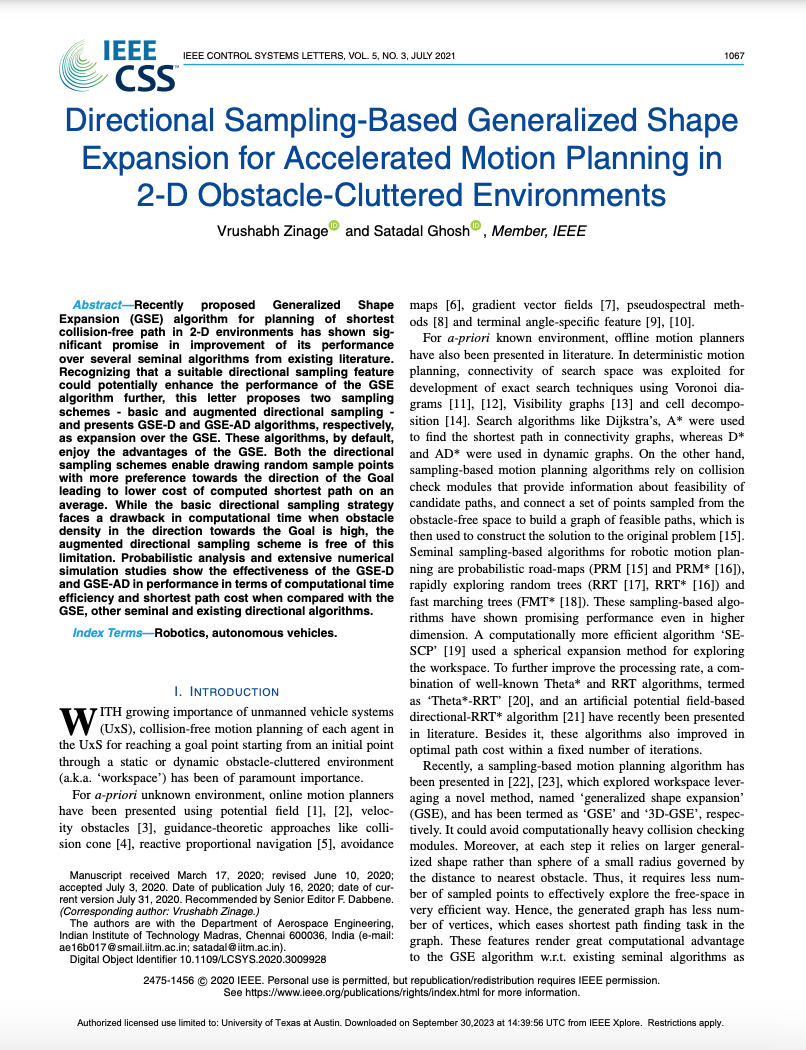
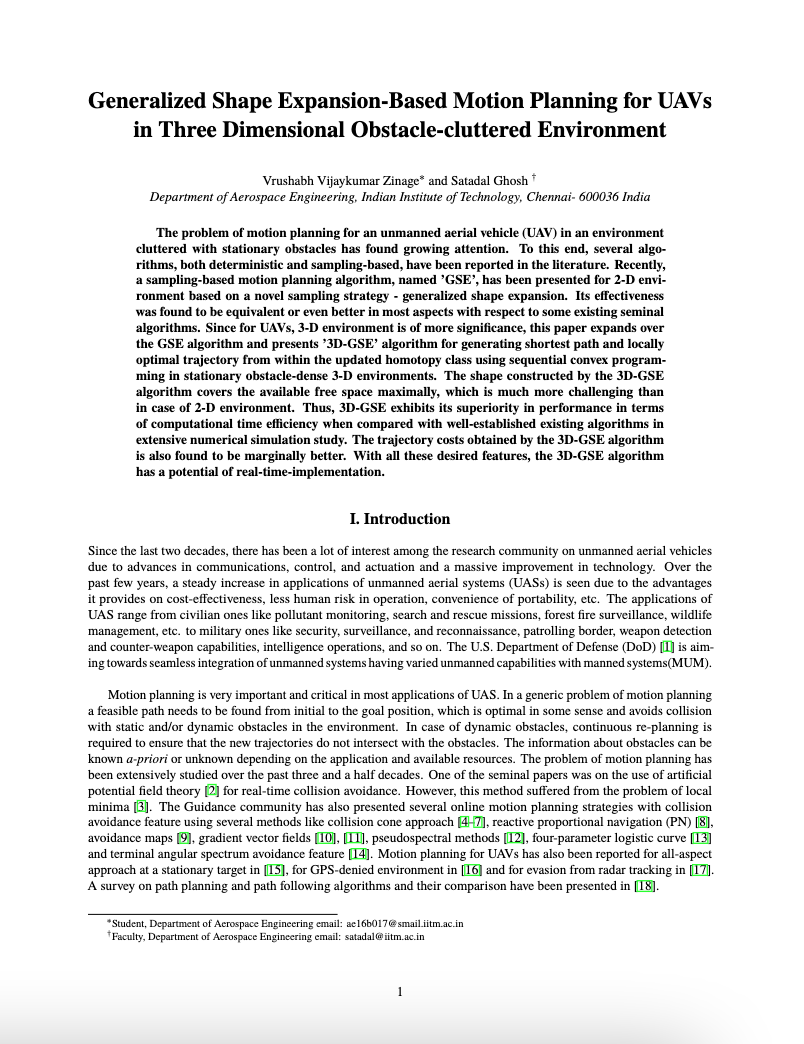
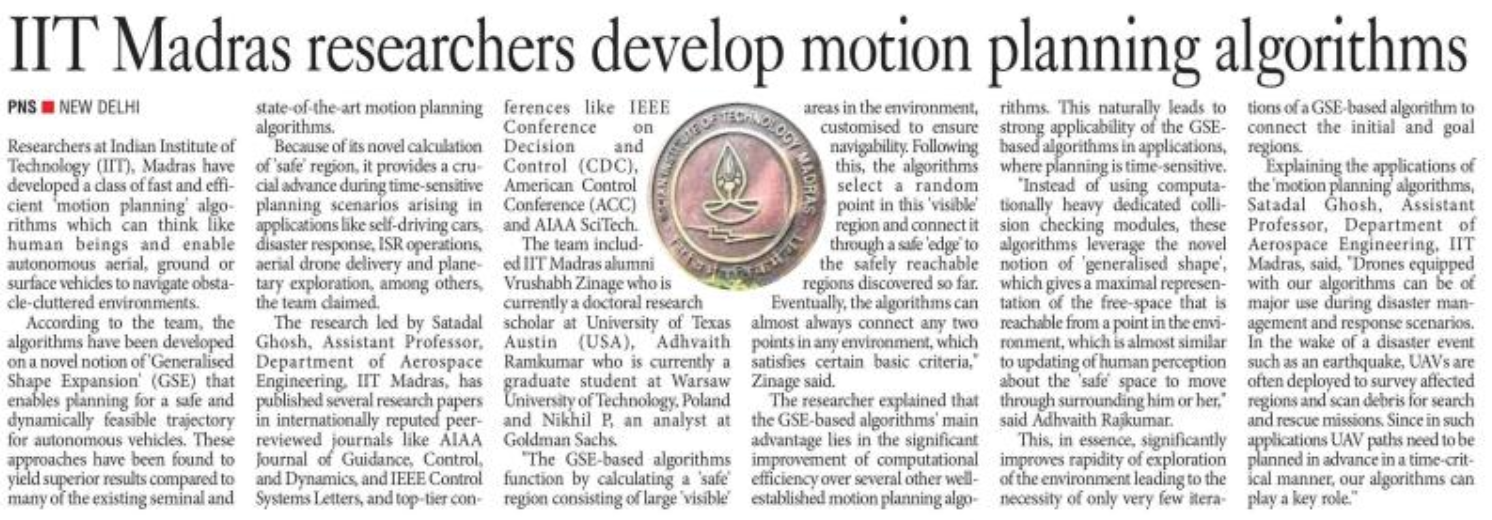
I have previously interned at GAMMA Lab. of the University of Maryland under the advise of Prof. Dinesh Manocha on fast online motion planning algorithms in unknown environments. I have also interned at Airbus and Honeywell Aerospace, India. Prior to joining UT, I worked with Prof. Satadal Ghosh on developing fast and efficient sampling-based motion planning algorithms during my bachelor's at IIT Madras.
If you're interested in collaborating on a research project, please fill out this form. Additionally, if you would like to connect informally, feel free to schedule a virtual coffee chat using this link.
Latest News
- 03-2026: ContractionPPO got accepted to RA-L!
- 09-2025: Appointed as the Associate Editor (AE) for IEEE Robotics and Automation Letters (RA-L) journal (top journal in Robotics)!
- 05-2025: Accepted into "AI Startup School" organized by Y Combinator.
- 05-2025: Accepted into "Future Leaders in Aerospace Symposium 2025".
- 04-2025: I will be co-chairing the session "Optimization and Trajectory Planning" at ICRA 2025 in Atlanta, USA.
- 03-2025: Successfully defended PhD dissertation.
- 03-2025: One paper got accepted to Autonomous Robots journal.
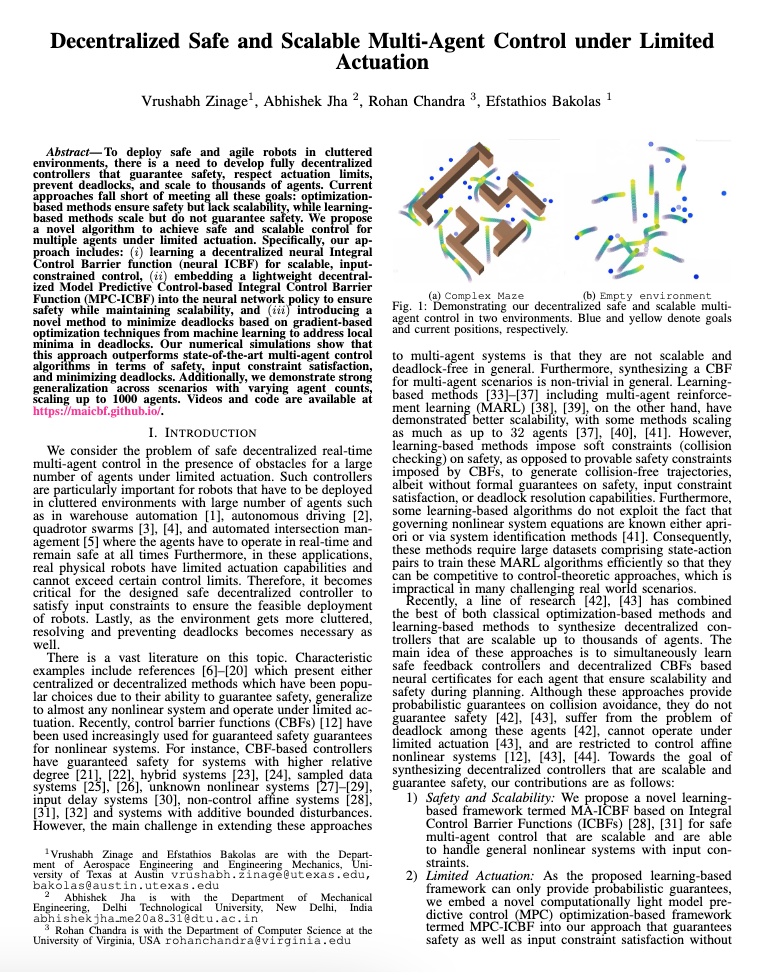
- 01-2025: 2 papers got accepted at ICRA 2025.
- 01-2025: I will be chairing the AIAA SciTech 2025 session on 'Guidance, Navigation and Control (GNC-38)' at Orlando, Florida
- 08-2024: One Paper accepted to AIAA SciTech 2025
- 05-2024: One Paper accepted at AIAA JGCD
- 05-2024: One Paper accepted at TAC